In questa sezione è riportata un’introduzione al posizionamento satellitare attraverso una descrizione delle principali costellazioni satellitari, degli strumenti e le principali tecniche di rilevo. La parte finale descrive le Reti di Stazioni Permanenti e i dati forniti.
Introduzione ai Sistemi di Posizionamento e Navigazione Satellitare [Torna su]
Il posizionamento satellitare si basa sulla ricezione di segnali provenienti da satelliti artificiali in orbita a circa 20000 Km dalla superficie terrestre e attraverso una tecnica di intersezione spaziale distanziometrica permette di stimare le coordinate tridimensionali di siti occupati da stazioni riceventi in un sistema di riferimento geocentrico con precisioni che vanno da qualche metro a meno del cm, secondo le osservabili acquisite dal ricevitore e il tipo di rilievo eseguito.
Dall’eliminazione nel 2000 della Selective Availability, la degradazione volontaria del segnale effettuata dal DOD (Dipartimento della Difesa americana), i satelliti artificiali sono impiegati anche per la navigazione stradale raggiungendo precisioni nell'ordine di qualche metro con misure di codice in posizionamento assoluto. Si parla di navigazione satellitare di precisione se si impiegano tecniche di rilievo che consentono di migliorare il grado di accuratezza raggiungibile e di navigazione satellitare assistita di precisione se si impiegano, oltre ai ricevitori GPS/GNSS, anche sensori inerziali per garantire in ogni condizione una soluzione.
Contemporaneamente lo sviluppo di reti di stazioni permanenti e dei loro servizi ha consentito di semplificare l'impiego delle tecniche di posizionamento satellitare ad uso tecnico e di migliorare ulteriormente le precisioni.
Fino a qualche anno fa il posizionamento satellitare era sinonimo di GPS, in quanto questa costellazione satellitare era l'unica attiva e pienamente operativa.
Dal 2001 il Presidente Putin ha varato il rilancio della costellazione Glonass, che conta attualmente 27 satelliti in orbita ed entro la metà del 2011 dichiarerà la piena operatività. La Comunità Europea ha recentemente dichiarato che Galileo sarà operativo in Europa nel 2014-2015 (18 satelliti – copertura europea) e entro il 2020 anche la Repubblica Popolare Cinese, con il Compass, dovrebbe raggiungere la copertura globale. Altri Paesi come il Giappone e l'India stanno realizzando costellazioni satellitari regionali, denominate rispettivamente QZSS e IRNSS, e numerose saranno anche le realizzazioni di sistemi SBAS (Satellite Based Augmentation System): MSAS (Giappone), GAGAN (India), NIGCOMSAT-1 (Nigeria), insieme a EGNOS (Europa) e WAAS (U.S.A.), le quali sono già attive.
E' quindi necessario ora parlare di GNSS, acronimo di Global Navigation Satellite System, che indica la possibilità di impiegare contemporaneamente i segnali acquisiti dalle costellazioni globali operative e future anche grazie agli accordi effettuati tra i vari gestori di tali sistemi per garantire la massima compatibilità e interoperabilità. Entro qualche anno saranno quindi in orbita circa 100 satelliti totali che consentiranno quindi il posizionamento in condizioni anche notevolmente difficili.
Una costellazione GNSS è costituita da tre segmenti:
- Segmento spaziale
- Segmento di controllo
- Utenza
Il segmento spaziale è la costellazione dei satelliti che orbitano attorno alla Terra; i piani orbitali materializzano un sistema di riferimento inerziale.
Le posizioni dei satelliti (effemeridi) sono note al variare del tempo con precisione relativa molto elevata (0.05 ppm), l'orologio di bordo è di elevata stabilità (perde un secondo ogni 3'000'000 di anni).
Il segmento di controllo è costituito da stazioni permanenti distribuite in modo omogeneo sulla Terra e svolge svariate funzioni: in primo luogo monitora lo stato di salute dei satelliti, nel senso che determina se l'orologio di bordo funziona correttamente, valuta se vi sono malfunzionamenti, calcola le effemeridi (o orbite), che provvede poi a ritrasmettere agli stessi, infine materializza un sistema di riferimento terrestre.
L'utenza è costituita da tutti coloro che usufruiscono dei servizi offerti dai GNSS. Le applicazioni sono svariate: navigazione (navigatori da auto, imbarcazioni ecc), geofisica, geodesia, topografia ecc. A livello topografico le principali applicazioni sono: rilievi di inquadramento, rilievi di dettaglio, rilievi GNSS/GIS, rilievi catastali, mobile mapping system, monitoraggi, ecc.

GPS [Torna su]
Dopo aver realizzato numerosi tentativi e alcuni sistemi satellitari, di cui ad esempio il Loran-C è tuttora operativo, nel 1973 fu varato il progetto del NAVSTAR GPS, acronimo di NAVigation Satellite Time and Ranging Global Positioning System.
Una prima definizione di questo sistema, nato per applicazioni militari, poi impiegato anche in ambito civile, chiarisce pienamente le sue caratteristiche :
“The NAVSTAR Global Positioning System (GPS) is an all-weather, space-based navigation system under development by the U.S. Department of Defense to satisfy the requirements for the military forces to accurately determine their position, velocity, and time in a common reference system, anywhere on or near the Earth on a continuous basis.” (Wooden, 1985)
“Il NAVSTAR Global Positioning System (GPS) è un sistema di navigazione spaziale in grado di operare in ogni condizione meteo, sviluppato dal Dipartimento di Difesa Americano per soddisfare le richieste delle forze armate per stimare accuratamente la loro posizione, velocità e tempo in un comune sistema di riferimento, ovunque e indifferentemente sulla Terra o sopra di essa”
Il GPS ha raggiunto la piena operatività nel 1995, il suo segmento spaziale di progetto conta una costellazione di 24 satelliti che orbitano ad una quota di circa 20200 km, distribuiti su 6 piani orbitali equispaziati in longitudine ed inclinati rispetto al piano equatoriale di 55°.
Attualmente il segmento spaziale è costituito di 31 satelliti, un numero decisamente superiore rispetto ai 24 previsti, ma ciò è dovuto all'elevato life-time dei satelliti più vecchi: è ancora attivo il satellite PRN32 messo in orbita nel 1990.
Ogni satellite impiega poco meno di 12 ore a compiere una rivoluzione totale, da Terra in assenza di ostacoli è visibile per circa 5 ore.
I satelliti trasmettono il segnale su due frequenze portanti, L1=1575.42 MHz (lunghezza d'onda di circa 19 cm), ed L2=1227.60 MHz (lunghezza d'onda di circa 24 cm). L’anno scorso è stato inviato in orbita il primo satellite che invia segnali anche dalla terza frequenza L5=1176.45 MHz, il cui utilizzo porterà numerosi vantaggi nel posizionamento e navigazione in tempo reale e post-processamento.
Per poter trasferire informazioni le onde vengono modulate attraverso codici binari, codice C/A (Coarse Acquisition), il codice militare P (Precision) e il messaggio navigazionale.
Il segmento di Controllo è composto di 16 stazioni distribuite omogeneamente lungo la fascia equatoriale.
Le orbite dei satelliti sono note nel sistema di riferimento WGS84 (World Geodetic System 1984).
Il numero di utenti GPS è andato progressivamente aumentando negli anni, differenziandosi per tipologie e applicazioni (navigazione, geofisica, geodesia, topografia, ecc).

Satellite GPS
GLONASS [Torna su]
E’ il sistema di navigazione satellitare russo GLONASS (Global'naja Navigacionnaja Sputnikovaja Sistema (GLObal NAvigation Satellite System), sviluppato dal 1982 e ha raggiunto la piena operatività nel 1995, poi un lento degrado a causa delle vicissitudini storico/economiche che hanno riguardato l'URSS connesse al breve life-time di soli tre anni dei primi satelliti GLONASS. Il piano di rilancio del 2001 porterà entro la metà del 2011 alla dichiarazione della piena operatività di questa costellazione con 23 satelliti attivi (1 in manutenzione e 3 di riserva).
I satelliti GLONASS orbitano su 3 piani inclinati rispetto al piano dell'equatore di circa 65° e si trovano ad una quota di circa 19000 km, il periodo di rivoluzione è di 11 ore e 15 minuti. Le orbite dei satelliti sono note nel sistema di riferimento PZ-90.
Il GLONASS trasmette i segnali utilizzando la tecnica denominata FDMA (Frequency Division Multiple Access) basata sulla trasmissione dello stesso codice con frequenze differenti proprie di ogni satellite. Le frequenze si ottengono dalle seguenti relazioni:
L1=1602+k*0.5625 MHz, L2=1246+k*0.4375MHz e la futura L3=1201.5+k*0.4375MHz con k che è una costante (numero indicato tra parentesi nell’immagine 3 a fondo pagina) propria di ogni satellite (in realtà i due satelliti che sono sullo stesso piano orbitale, ma agli antipodi, hanno lo stesso valore della costante quindi stessa frequenza, perché tanto non possono essere tracciati contemporaneamente)

L'intero segmento di controllo si trova sul territorio dell'ex-Unione Sovietica.
La costellazione GLONASS conta attualmente 27 satelliti, di cui 23 operativi, uno in fase di attivazione e 3 in manutenzione, ha quindi raggiunto la piena operatività, tanto che in alcuni periodi della giornata si ha la parità tra il numero dei satelliti GPS e GLONASS, e ovviamente evidenti vantaggi per chi opera in zone a scarsa visibilità satellitare. Rispetto alla costellazione GPS, i satelliti GLONASS garantiscono una migliore copertura a Nord della volta celeste.
I futuri satelliti GLONASS trasmetteranno i segnali con la stessa tecnica CDMA del GPS rendendo più semplice l’hardware dei ricevitori grazie alla migliore compatibilità con i segnali GPS, il primo satellite che sperimenta tale approccio sulla terza frequenza GLONASS, è stato inviato in orbita lo scorso 26 Febbraio. Questo satellite appartiene alla nuova generazione GLONASS-K che garantisce un life-time di dieci anni pari ai satelliti GPS.
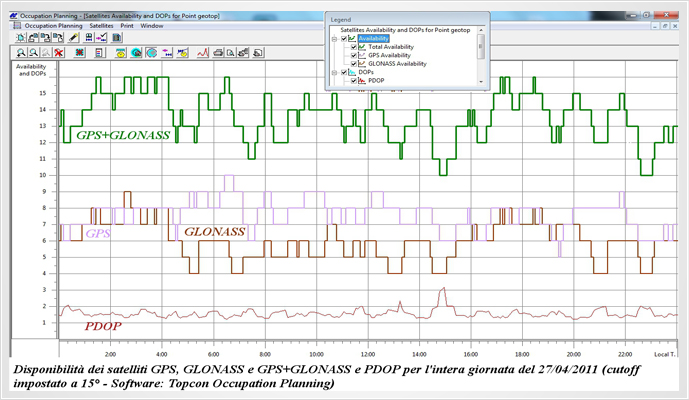
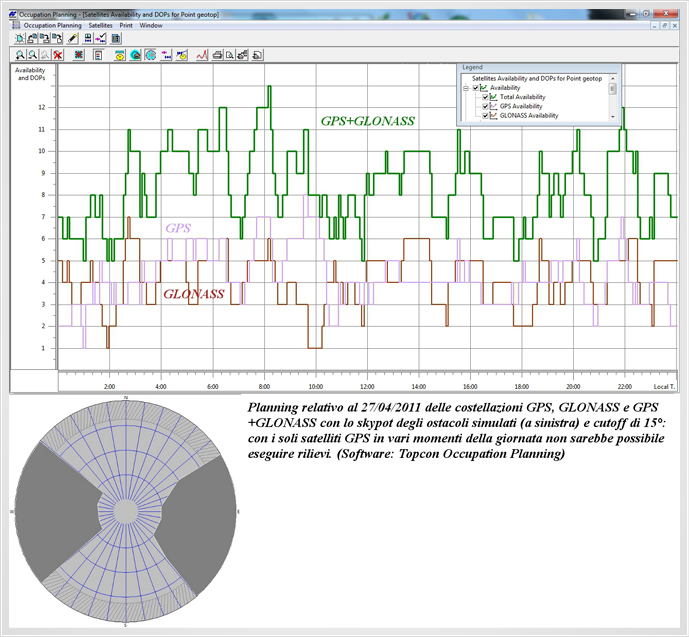
Nelle immagini a piè pagina, a titolo esemplificativo, è riportata la disponibilità satellitare delle costellazioni GPS, GLONASS e GPS+GLONASS relativa al 27/04/2011 con angolo di cutoff di 15°. Si può chiaramente notare che è possibile eseguire rilievi sia con i soli GPS che con i soli GLONASS (possibilità importante nell’eventualità ad esempio di disturbi elettromagnetici o jamming nei pressi di zone militari) in qualsiasi momento della giornata. E’ stata anche simulata la presenza di ostacoli alla visibilità satellitare che possono rendere impossibile il rilievo con i soli satelliti GPS in diversi periodi della giornata. Tutte le simulazioni sono state effettuate con il software: Topcon Occupation Planning.
GALILEO [Torna su]
Galileo è il nome del progetto del Sistema di Navigazione Satellitare europeo.
Il primo satellite (Giove A) è stato lanciato il 28 dicembre 2005, il secondo, Giove B, il 27 aprile 2008, nel 2011 è previsto il lancio di 4 satelliti e nel 2014 l’operatività della costellazione nell’area europea.
Il sistema sarà costituito da 30 satelliti orbitanti su 3 piani inclinati rispetto al piano equatoriale terrestre di circa 56°e ad una quota di circa 24000 km dalla superficie terrestre.
I satelliti del sistema Galileo trasmetteranno i segnali relativi ai numerosi servizi previsti, su quattro frequenze:
• E1 1575.420 (frequenza centrale)
• E6 1278.750 (frequenza centrale)
• E5 1191.795 (frequenza centrale)
• E5a 1176.450 (frequenza centrale)
• E5b 1207.140 (frequenza centrale)
Alcune di queste bande sono parzialmente sovrapposte a quelle del GPS, in particolare la E1 e la E5a corrisponderanno rispettivamente alla L1 e L5 GPS, così da garantire l'interoperabilità tra i due sistemi. La politica europea è stata subito orientata alla massima compatibilità con il GPS, infatti i tipi di modulazione usati rendono i due sistemi compatibili ed il fatto che la frequenza centrale sia la stessa per entrambi darà la possibilità all'utente di accedere ad entrambi con un minimo incremento della complessità e di conseguenza dei costi del ricevitore. Il programma di posizionamento satellitare europeo prevede anche diversi accordi con Cina e Giappone, vale a dire con coloro che dispongono o disporranno a breve di sistemi di posizionamento satellitari. Nell'accordo tra Galileo e GLONASS dovrebbe essere sancito l'uso comune delle bande E5b ed L3 (GLONASS), in modo da consentire una maggiore interoperabilità tra i due sistemi.
I sistemi SBAS: EGNOS [Torna su]
Un sistema SBAS è costituito da una costellazione di satelliti geostazionari con il compito di inviare correzioni differenziali, calcolate da una rete di stazioni permanenti a terra, sulla frequenza L1, così da aumentare l’accuratezza del posizionamento raggiungibile con i satelliti GPS.
In Europa è disponibile il sistema SBAS denominato EGNOS (European Geostationary Navigation Overlay System), costituito da tre satelliti geostazionari (identificati con PRN 120, 124 e 126) e sviluppato con l’intento di integrare i sistemi GPS, al fine di renderli compatibili con applicazioni critiche in termini di sicurezza come la navigazione aerea o navale, fluviale oppure semplicemente migliorare il grado di accuratezza del posizionamento satellitare con costellazioni globali.
EGNOS è un progetto dell’European Space Agency (ESA), dell’European Commission (EC) e di Eurocontrol, l’European Organisation for the Safety of Air Navigation. EGNOS è un SBAS Regional satellite-based augmentation system, equivalente al WAAS americano e al MSAS giapponese, con l’obiettivo di migliorare l’accuratezza della navigazione e posizionamento GPS fino ad arrivare a 1-3 metri, offrire un servizio e precisione garantiti attraverso l’integrità del segnale e fornire ulteriori segnali utili al posizionamento. Tali informazioni sono inviate sulla frequenza L1 GPS e tracciabili da semplici ricevitori GPS. Questo sistema risulta molto utile per applicazioni tipo GIS, sentieristica… perché consente di operare con un solo ricevitore senza alcun collegamento con altri sistemi e/o reti e senza la necessità di acquisire dati in statico-rapido. Strumenti come GMS2 e GRS1 (Topcon) possono operare in posizionamento assoluto con l’ausilio di EGNOS per le applicazioni suddette.
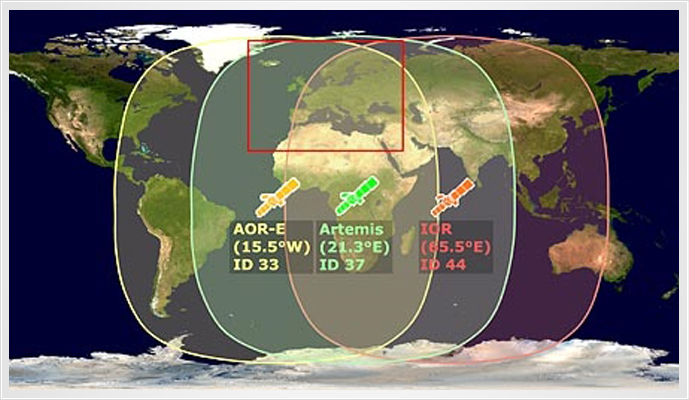
Copertura satellitare EGNOS
Anche per la costellazione GLONASS è stato varato un progetto dalla federazione russa che prevede un sistema SBAS denominato SDCM (System for Differential Correction and Monitoring), il quale invierà correzioni differenziali da satelliti geostazionari per migliorare l’accuratezza del posizionamento assoluto con i satelliti GLONASS. L’operatività è prevista entro il 2013.
COMPASS [Torna su]
Il sistema satellitare Compass o BEIDOU Satellite Navigation and Positioning è realizzato dalla Repubblica Popolare Cinese, questa costellazione sarà costituita da 30 satelliti non-geostazionari e 5 satelliti geostazionari a circa 21500 Km dalla superficie terrestre. Finora sono stati effettuati 7 lanci di satelliti, di cui 5 nel 2010. In seguito ad accordi effettuati con gli altri Enti che gestiscono costellazioni satellitari globali, la Cina ha adottato tecniche di modulazione del segnale (BOC e simili) che garantiranno la compatibilità con gli altri sistemi e due frequenze comuni al futuro Galileo.
STRUMENTI [Torna su]
La strumentazione di cui l'utenza si deve dotare per usare i sistemi GNSS è costituita da antenna, ricevitore e palmare; gli strumenti per applicazioni tecniche possono avere integrati più elementi.
L'antenna è progettata per ricevere e filtrare i segnali provenienti dai satelliti.
L'eventuale piatto metallico (ground plain) ad essa solidale permette di ridurre l'effetto dei multipath (segnali riflessi dal suolo e/o da ostacoli).
Nelle antenne i segnali sono ricevuti nel centro di fase che non è un punto materiale ma una regione dello spazio in cui viene captata l'onda elettromagnetica del segnale e la sua posizione è funzione dell'elevazione del satellite.
All'interno del ricevitore è presente un orologio, che per ragioni economiche, è di stabilità molto inferiore a quella dell'orologio del satellite (perde un secondo ogni 100 giorni).
A causa della differenza di stabilità tra gli orologi dei satelliti e dei ricevitori si genera, abbastanza rapidamente, un non sincronismo. Questo è uno degli errori che è presente nelle misure GNSS, che viene eliminato con opportuni modelli matematici nell'elaborazione delle misure stesse.
Il segnale ricevuto dall'antenna è crittografato, nel ricevitore viene decodificato e memorizzato sotto forma di misure di fase e pseudorange.
Il palmare è lo strumento che consente la gestione delle operazioni di rilievo tramite software.
Per trovare la strumentazione GNSS Topcon più adatta alle vostre esigenze cliccare qui
Tecniche di Posizionamento satellitare
[Torna su]
Il posizionamento satellitare è realizzato mediante una tecnica concettualmente ereditata dalla Topografia classica, infatti si tratta di un’intersezione spaziale distanziometrica: si considerano note le posizioni dei satelliti nel sistema WGS84 e, per stimare le coordinate incognite del generico ricevitore posto sulla superficie terrestre, occorre conoscere un numero sufficiente di range, cioè di distanze satellite-ricevitore, ad un dato istante.
Per la stima della distanza satellite-ricevitore possono essere seguiti due metodi:
• Misure di codice o pseudorange: effettuate sui codici trasmessi dal segnale, permettono di raggiungere basse precisioni (metriche), ma l'hardware utilizzato è di basso costo;
• Misure di fase: effettuate sulla portante del segnale, permettono di raggiungere elevate precisioni (fino a sub-centimetriche), l'hardware impiegato è più costoso.
Il posizionamento satellitare può avvenire secondo tre modalità:
• Posizionamento assoluto: le coordinate del vertice sul quale è posto il ricevitore sono stimate esclusivamente elaborando le osservazioni che ha eseguito rispetto ai satelliti acquisiti, il ricevitore opera quindi singolarmente e, date le basse precisioni raggiungibili con questa tecnica, si eseguono solo misure di codice
• Posizionamento relativo: due o più ricevitori sono posti in contemporanea acquisizione delle osservazioni di satelliti comuni, vengono stimate le componenti del vettore che unisce i due ricevitori (baseline). Questa tecnica permette di raggiungere precisioni migliori, perché vengono eliminati o ridotti i biases che intervengono nelle misure, perciò si impiegano misure di fase
• Posizionamento differenziale: è il tipo di posizionamento più impiegato a livello tecnico, un ricevitore singolo posto sul vertice da rilevare (rover) stima le proprie coordinate in posizionamento assoluto, ma queste vengono corrette da una correzione differenziale calcolata da una stazione base, posta su un punto di coordinate note, o da una rete di stazioni permanenti ed inviata al rover. In questo caso si possono ottenere buone precisioni. Tale tecnica può essere applicata alle misure di codice (DGPS) o fase (RTK)
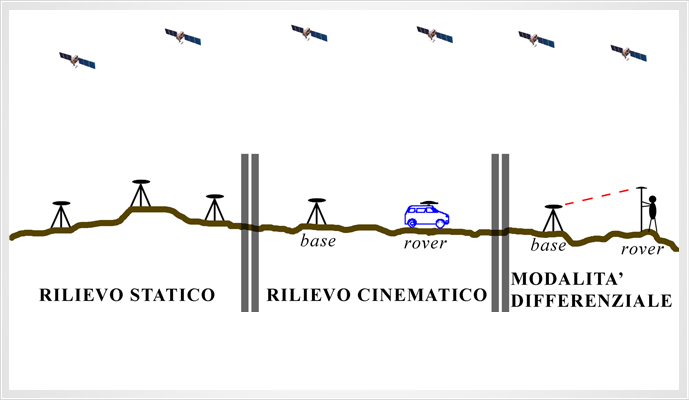
Tecniche di rilievo
Il posizionamento assoluto è la tecnica utilizzata dai navigatori stradali, dai ricevitori per trekking o in generale per la navigazione di bassa precisione.
Il posizionamento relativo è eseguito con due o più ricevitori in contemporanea acquisizione di segnali comuni dei satelliti, in particolare il rilievo può essere statico se tutti i ricevitori rimangono fermi in acquisizione per l’intera sessione di misura. La durata della sessione è dipendente dal numero di satelliti in visibilità, dalla lunghezza delle baselines, dalla precisione finale richiesta, dalla qualità di ricezione nei punti di misura. Nella pratica professionale è stata introdotta la tecnica di rilievo statico-rapido che consente tempi di stazionamento inferiore sui punti (questa metodologia di rilievo è impiegata in Mercurio quando si seleziona la modalità “punti in post-processing” e del modulo Meridiana GPS).
Nel rilievo cinematico un ricevitore fisso rimane fermo in un punto di coordinate note, mentre uno o più ricevitori sono in movimento continuo oppure si muovono cui i punti da determinare vengono occupati successivamente dal rover tenendolo fermo per un certo tempo la posizione del punto occupato dal ricevitore mobile viene calcolata rispetto ad uno strumento fisso in stazione su un vertice di coordinate note.
Il rilievo statico e statico-rapido è stato progressivamente sostituito nella pratica professionale dal rilievo in modalità differenziale, perché molto più rapido in quanto in campagna si ottengono le coordinate con accuratezza centimetrica dei punti senza la necessità di post-elaborare i dati. Questa tecnica di rilievo è detta RTK, acronimo di Real Time Kinematic se vengono inviate correzioni di codice e fase. Oggi vengono impiegate per molte applicazioni anche le correzioni di solo codice che garantiscono accuratezze sub metriche, in questo caso si parla di DGPS (Differential GPS).
Per lavorare in tempo reale è necessario integrare alla strumentazione GNSS un sistema di rice-trasmissione di dati (radio o GSM/GPRS/UMTS) dalla stazione fissa alla mobile.
Negli ordinari rilievi RTK un utente deve disporre di due strumenti, inoltre la distanza tra i due non dovrebbe superare i 15/20 Km; alcuni errori sistematici delle misure GNSS, infatti, dipendono dalla distanza (errori delle orbite, atmosferici e ionosferici) ed assumono entità quasi mai tollerabile quando questa supera la soglia indicata.
Per ovviare a queste problematiche di carattere economico e di natura tecnica si può ricorrere ad una Rete di Stazioni Permanenti GNSS; in questo modo per prima cosa per eseguire il rilevo è sufficiente disporre di un solo strumento, inoltre diventa possibile stimare gli errori indicati tramite interpolazioni su tutta l'area ricoperta dalla rete. La conoscenza di questi ultimi permette di aumentare la distanza tra gli strumenti (stazione permanente e ricevitore/utenza) oltre i 15/20 km. Un centro di controllo si occupa della gestione della rete e della fornitura all'utenza di diverse tipologie di servizi per il posizionamento in tempo reale ed in post-elaborazione.
Servizi forniti dalle Reti di Stazioni Permanenti [Torna su]
Un servizio di posizionamento GNSS è un'infrastruttura che fornisce dati all'utenza affinché questa possa determinare la propria posizione con la miglior precisione possibile in funzione dell'applicazione per cui questa è richiesta.
La posizione può essere determinata in tempo reale, si parla allora di servizi Network Real Time Kinematic (NRTK), o in post-elaborazione, con rilievi in modalità statica o statica-rapida.
La precisione può essere centimetrica nelle applicazioni NRTK e post-elaborazione, o sub-metrica in quelle DGPS (GPS/GIS), utilizzate per la realizzazione di Sistemi Informativi Territoriali (SIT/GIS).
Come i sistemi di navigazione satellitare anche un Servizio di Posizionamento è costituito da diversi segmenti:
- Rete di Stazioni GNSS Permanenti
- Centro di Controllo
- Utenza
La rete di stazioni permanenti è la parte dell'infrastruttura installata direttamente sul territorio.
Ogni stazione è costituita da un'antenna e un ricevitore GNSS, collegati al centro di controllo tramite Internet. La stazione trasmette in tempo reale i dati ricevuti dai satelliti delle costellazioni GPS e Glonass (in futuro anche Galileo) al Centro di Controllo.
Il Centro di Controllo ha svariati compiti: ricezione, elaborazione e memorizzazione dei dati provenienti dalle stazioni permanenti, fornitura dei servizi in tempo reale (NRTK) e per la post-elaborazione all'utenza.
Per fornire i servizi NRTK i dati sono elaborati in tempo reale in modo da ottenere una "mappatura" degli errori presenti nelle misure GNSS (ionosferici, troposferici, delle orbite, degli orologi, multipath), sull'intero territorio coperto dalla rete; gli errori determinati per le singole stazioni permanenti sono usati per generare dei polinomi di interpolazione definiti sull'area coperta dalla rete. All'utente che richiede il servizio in tempo reale vengono fornite le correzioni differenziali ricostruite a partire da questi ultimi.
Le correzioni possono essere fornite in diversi formati:
- NEAREST:
vengono fornite le correzioni prodotte dalla stazione permanente più vicina all'utente
- VRS (Virtual Reference Station):
vengono fornite le osservazioni e le correzioni di una stazione permanente virtuale (pertanto inesistente nella realtà), ricostruite come se la stazione avesse realmente misurato. La VRS viene posta in una posizione prossima all'utente (variabile da pochi metri a 4-5 km, a seconda del software usato per la gestione della rete)
- FKP (Flächen-Korrektur-Parameter, parametri di correzione d’area):
vengono fornite le osservazioni di una stazione di riferimento e le correzioni di rete calcolate e personalizzate per l’utente
- MAC (Master-Auxiliary-Concept):
vengono fornite le osservazioni di una stazione di riferimento e le correzioni di stazioni ausiliarie, ridotte ad un livello comune di ambiguità (le ambiguità sono sottratte alle osservazioni)
- DGPS (Differential GPS):
vengono fornite le correzioni di codice necessarie alle applicazioni GPS/GIS.
Le correzioni sono trasmesse secondo il formato standard Radio Technical Commission for Maritime Services (RTCM 2.x o 3.x) via internet con il protocollo Networked Transport of RTCM via Internet Protocol (NTRIP). Possono essere inviate correzioni differenziali tramite protocollo CMR.
Per la post-elaborazione il Centro di Controllo fornisce all'utenza le misure registrate dalle singole stazioni con diverso campionamento (tipicamente da 1 a 30 secondi) in formato di interscambio RINEX.
L'utenza può usufruire dei servizi allo scopo di eseguire rilievi topografici di varie tipologie: rilievi di inquadramento, rilievi di dettagli, rilievi catastali, monitoraggi, catasto strade, realizzazione di SIT, ecc.
Una Rete di Stazioni Permanenti dovrebbe garantire di poter lavorare sia con la costellazione GPS che con il GLONASS, e dovrebbe essere predisposta per GALILEO. Per l'utenza il vantaggio principale di avere un ricevitore che usi i segnali provenienti da più costellazioni è quello di poter lavorare sempre con un numero elevato di satelliti specialmente nei casi in cui ostacoli (alberi, case, ecc.) limitino l'apertura al cielo e quindi la ricezione dei segnali.
In futuro l'impiego di strumentazione GPS+GLONASS+GALILEO potrà sicuramente garantire una operatività superiore rispetto a quella raggiungibile con una soluzione solamente GPS.












